Par演講主題:以模糊控制為基礎之自動導航車
發演講者:龍華科技大學研發長潘亞東博士
紀錄人:吳政龍
紀錄人指導教授:孫茂誠 教授
主持人:孔光源 教授
日期:100.9.7
發演講者:龍華科技大學研發長潘亞東博士
紀錄人:吳政龍
紀錄人指導教授:孫茂誠 教授
主持人:孔光源 教授
日期:100.9.7
以模糊控制為基礎那就先來探討甚麼是模糊控制:1.定義輸入及輸出變數。
通常,模糊控制的輸入變數可以是擷取自受控系統的觀測量。也可以是推導出來的資料;而模糊控制的輸出變數則為操控受控系統的操作量。 設計模糊控制時,要利用一些方法去選擇適當的輸出入變數,並加以定義。輸入到模糊控制的資料可能是代表觀測量的確定數值(crisp value),也可能是帶有模糊性質的干擾(disturbance)雜訊。設計模糊控制時必須考慮輸入信號的各種可能形式,選擇適當的模糊化方式,以便將系統的狀態轉換成語言變數。特點
- 簡化系統設計的複雜性,特別適用於非線性、時變、模型不完全的系統上。
- 利用控制法則來描述系統變數間的關係。
- 不用數值而用語言式的模糊變數來描述系統,模糊控制器不必對被控制對象建立完整的數學模式。
- 模糊控制器是一語言控制器,使得操作人員易於使用自然語言自然語言進行人機對話。
- 模糊控制器是一種容易控制、掌握的較理想的非線性控制器,具有較佳的適應性及強健性(Robustness)、較佳的容錯性(Fault Tolerance)
- 應用在自動導航車上,來進行避障功能,但仍有許多無法突破的技術,期待未來有更大的突破
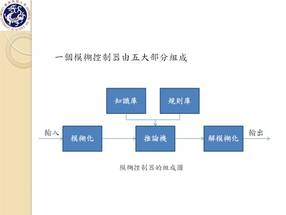
模糊控制器以五大部分組成 從知識庫 規劃庫 到模糊化 推論機 解模糊化
從輸入到輸出
從輸入到輸出
自動導航車程式架構

—第一層 : 作業系統 ( P2-OS ) —
Pioneer 3 - DX 本體為一台具有運算能力的伺服器,由H8S 的單晶片做運算處理,自動導航車本身架構了一個 P2-OS 的基本作業系統
—第三層 : 程式介面 — 程式介面是由DOS介面所顯示,本介面主要在此輸入指令並顯示來自第二層程式核心的資訊。
—第三層 : 程式介面 — 程式介面是由DOS介面所顯示,本介面主要在此輸入指令並顯示來自第二層程式核心的資訊。
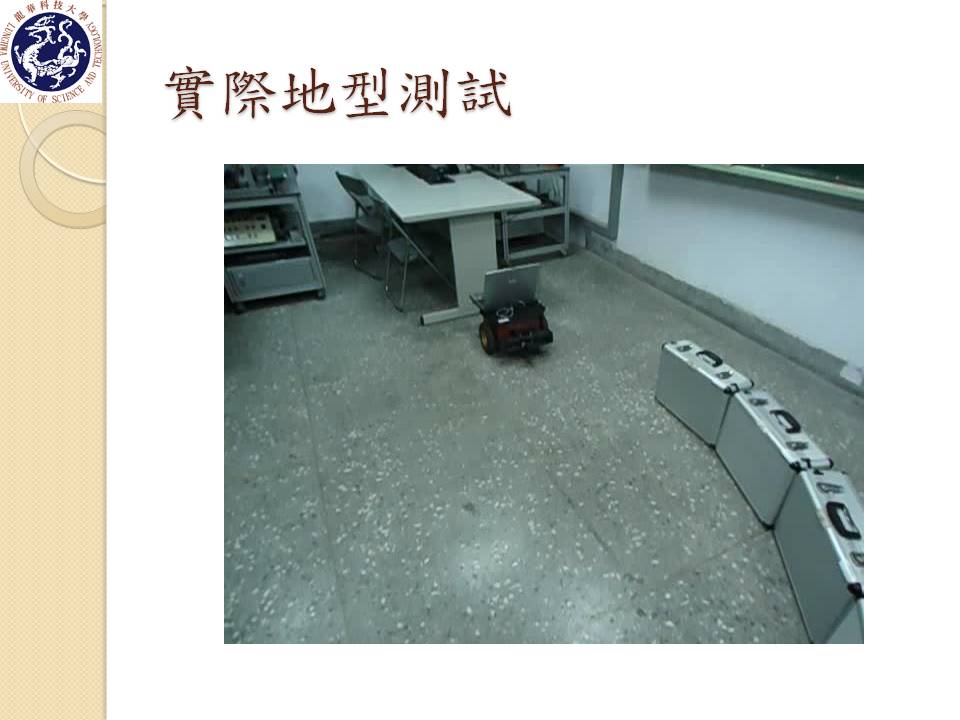
利用模糊控制避障
利用導航來避開障礙 已經是目前可以用於廣泛的自動操作系統上
